|
Project time frame: Jan - May 2019
|
Executable download: LINK
|
Project type: Coursework
|
Overview
This year we had a module about artificial intelligence (AI) and how it is used in games. The brief for the project was to research and implement a fuzzy inference system (FIS) controlled vehicle, and an alternative method, or a human emotion recognition application and I chose to create the former.
AI has many uses in games but is mainly used as a controller of the in-game characters and other entities. For example, the movement of characters or decision making in areas such as dialogue or the choice of action. FIS is a form of many-valued logic where it takes input and “fuzzifies” them to return a number between 0 and 1 which can be referred to false and true respectively. As an alternative method, I have chosen to implement a Finite-state machine (FSM) which unlike fuzzy logic, either returns true or false rather than anything in between.
AI has many uses in games but is mainly used as a controller of the in-game characters and other entities. For example, the movement of characters or decision making in areas such as dialogue or the choice of action. FIS is a form of many-valued logic where it takes input and “fuzzifies” them to return a number between 0 and 1 which can be referred to false and true respectively. As an alternative method, I have chosen to implement a Finite-state machine (FSM) which unlike fuzzy logic, either returns true or false rather than anything in between.
Methodology
Upon is a successful launch, the user will be greeted with 2 windows; one is a Windows console and the other is a SFML graphics window, which will be talked about more in the Tools section. On the Windows console, the user will be presented with an option to either start the application in Test Mode or Application Mode.
Test Mode
The user will use the Windows console and can either choose to test FSM or FIS. For FSM, the application will simulate the vehicle driving from the right and then from the left and write it to a .csv file. For FIS, the user can input 2 sets of values within a requested range, and once entered, the application will calculate the output and display it on the console. Once the output is displayed, the application will ask the user if they would like to continue testing or go into Application Mode. This testing process can continue indefinitely until the user closes the application or goes into Application Mode. In addition, the user can return to Test Mode whenever they desire by pressing the return key on the keyboard.
Application Mode
Using the keyboard, the user will have various amount of controls that were shown above. The user can proceed to move the race line left and right. The application will then begin to move the car towards the new location of the line using one of the selected AI methods. The user can also modify the rate of change for the position of the race line, go back into Test Mode and change the AI being used by pressing the R key. The velocity and distance are measured in pixels/time and pixels between the car and the race line respectively. These values are displayed at the top of the application alongside the output, which is the horizontal velocity calculated by the AI method. Lastly, the application indicates the direction the car is moving by setting the colour of the direction text to green.
Implementation
Fuzzy inference system Design
The FIS was designed using Matlab's Fuzzy Logic Toolbox The file generated by Matlab was then implemented into the application using Fuzzylite's library. As outlined by the coursework brief, the FIS was designed to take 2 inputs, distance and velocity, and calculate the new velocity based on the two inputs to move the car.
To summarize the inputs:
The Defuzzification method chosen for the FIS was Centroid, or Centre of Gravity. This is because the method allowed for more accurate results which outweighs the downsides of requiring more computational resources compared to its alternatives. Be this project extended however, this case would of require more testing and analysis to determine the most suitable and efficient Defuzzification method.
To summarize the inputs:
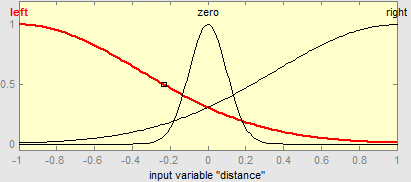
- The Distance (from the race line to the car) could either be left, straight or right.
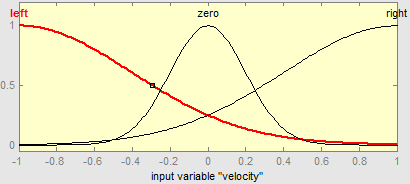
- The Velocity of the car is either making it move left or right towards the race line.
The Defuzzification method chosen for the FIS was Centroid, or Centre of Gravity. This is because the method allowed for more accurate results which outweighs the downsides of requiring more computational resources compared to its alternatives. Be this project extended however, this case would of require more testing and analysis to determine the most suitable and efficient Defuzzification method.
|
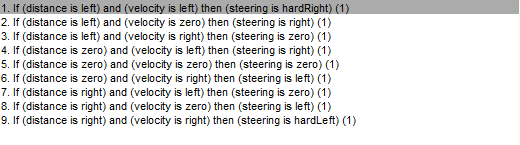
A quick design for the rules of the membership functions, table on the top, was quickly adapted to the final version, the second table, used for the application. The reason for this re-design was that the car would receive a drastic change in speed when passing the threshold between the zero and hard left or hard right membership functions.
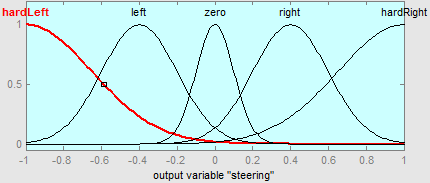
The rules designed from the final table and implemented into Matlab's FIS can also be seen on the right. The output was assigned 5 membership functions; Hard Left, Left, Zero (No Change), Right and Hard Right. The outputs domain was set to -1 to 1 (same as the inputs) to allow for scaling in applications when required. |


|
The membership functions for the inputs and output can be seen in the fuzzy sets below. Both inputs and output use a Gaussian curve to ease the sharp change in the velocity of the vehicle due to its nature and to try and match how a vehicle's velocity would work in the real world.
|
|
Finite-state machine Design
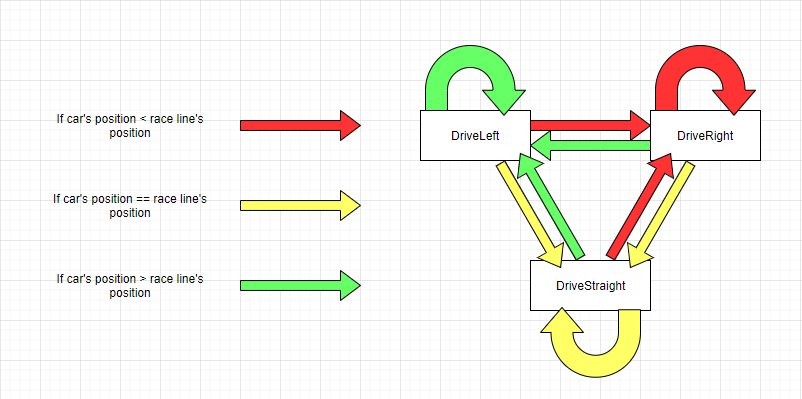
For the alternative AI method, I have chosen to implement a FSM and compare it against FIS . The FSM has 3 different states; DriveLeft, DriveRight and DriveStraight.
Due to only having 3 states, the transitions between them were kept simple:
3 functions were created to handle the change in states; onStateExit, changeState and onStateEnter. Upon state exit, the application would turn the corresponding text on the screen to red. Then on state enter, the opposite would happen, and the application would turn the corresponding text on the screen to green. For example, if the state before the switch was Driving Straight and the new state Driving Right, turn the text “Driving Straight” to red and “Driving Right” to green. While the FSM is running, a switch statement is used to handle how the velocity is calculated based on the current state.
Upon testing, due to the way the velocity of the vehicle is calculated (distance between the car and the race line times by delta time), the closer the vehicle would get to the race line the slower the velocity would become. This resulted in the states not transitioning correctly as if the vehicle started going right, it would never fully reach the exact position of the race line. To fix this behavior, a marginal distance variable was implemented to allow the application to check if the distance between the car and the race line is less or greater than that and switch states correctly.
Due to only having 3 states, the transitions between them were kept simple:
- 1.Is the car’s position left of the race line? If so, start driving right.
- 2.Is the car’s position right of the race line? If so, start driving left.
- 3.Is the car’s position the same as the race line’s? If so, drive straight.
3 functions were created to handle the change in states; onStateExit, changeState and onStateEnter. Upon state exit, the application would turn the corresponding text on the screen to red. Then on state enter, the opposite would happen, and the application would turn the corresponding text on the screen to green. For example, if the state before the switch was Driving Straight and the new state Driving Right, turn the text “Driving Straight” to red and “Driving Right” to green. While the FSM is running, a switch statement is used to handle how the velocity is calculated based on the current state.
Upon testing, due to the way the velocity of the vehicle is calculated (distance between the car and the race line times by delta time), the closer the vehicle would get to the race line the slower the velocity would become. This resulted in the states not transitioning correctly as if the vehicle started going right, it would never fully reach the exact position of the race line. To fix this behavior, a marginal distance variable was implemented to allow the application to check if the distance between the car and the race line is less or greater than that and switch states correctly.
Testing
FIS test results
|
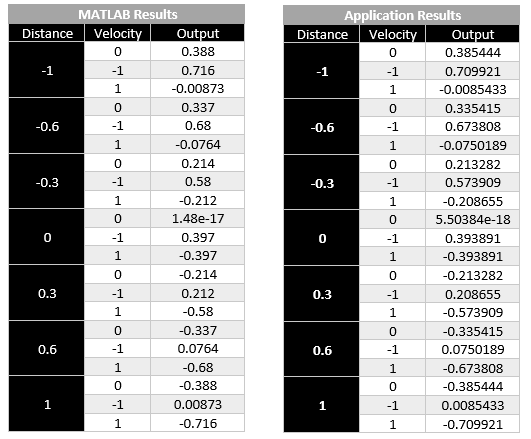
The tables below are examples of output calculations based on the Distance and Velocity inputs. Each Distance value was tested with Velocity of -1, 0 and 1. The left table holds the results gathered from using Matlab and the right table holds the results from using the Application.
After comparing the tables, it was discovered that there was a considerable difference between the two sets of data. This could be due to differences in the data structures used (double vs long vs float), the way the defuzzification method is calculated, rounding errors and even rounding to different decimal places. |
|
FSM test results
|
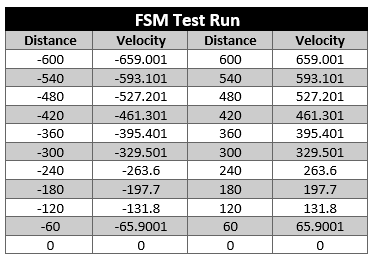
From gathering the values from one test run in the Test Mode, the velocity values are just slightly bigger than the distance and exactly mirrored. For example, -263.6 and 263.6.
There could have been more test data however that was deemed unnecessary as the results would have been almost identical due to the nature of the code. The only factor that would affect the results would be the delta time. |
|
These results have been plotted onto graphs for a visual representation and the document is available here. LINK
Conclusion
From studying the results, there is a noticeable discrepancy between the MATLAB’s and FuzzyLite’s Fuzzy Inference System. However, that is not surprising due to them being developed by separate parties and possibly using different mathematical strategies. Thankfully, the impact of the difference is negligible and allows the application to run as intended.
The Finite-state machine worked exactly as intended after implementing the marginal distance variable, mostly due to its simple design and application’s usage. There could have been other ways of fixing the issue of states not switching correctly but implementing a single variable was the simplest choice.
To compare the FIS to FSM, they both worked quite well, and both had their up and down sides. Both were quite simple to implement, and both had a fantastic way to simulate a driven car. The FIS offered that smooth increase in speed once it was too far from the race line. That could have been implemented for the FSM as well but would have required more states and variables. The FSM was able to update the text during state enter and exit while FIS required that check in a separate function. Lastly, FIS allows designers to develop and test an AI with little to none programming knowledge due to its clean and informative user interface.
Overall, the application highlights the strengths of using a Fuzzy Inference System and a Finite State Machines. They are easy to implement, simple to manage and are expandable meaning they could be used in a vast variety of games.
The Finite-state machine worked exactly as intended after implementing the marginal distance variable, mostly due to its simple design and application’s usage. There could have been other ways of fixing the issue of states not switching correctly but implementing a single variable was the simplest choice.
To compare the FIS to FSM, they both worked quite well, and both had their up and down sides. Both were quite simple to implement, and both had a fantastic way to simulate a driven car. The FIS offered that smooth increase in speed once it was too far from the race line. That could have been implemented for the FSM as well but would have required more states and variables. The FSM was able to update the text during state enter and exit while FIS required that check in a separate function. Lastly, FIS allows designers to develop and test an AI with little to none programming knowledge due to its clean and informative user interface.
Overall, the application highlights the strengths of using a Fuzzy Inference System and a Finite State Machines. They are easy to implement, simple to manage and are expandable meaning they could be used in a vast variety of games.
